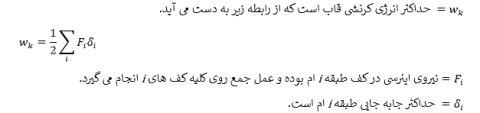
یکی از مشکلات همیشگی مهندسین برای طراحی ساختمانها مخصوصاً سازه های بلند مرتبه، اثرات نیروی جانبی ناشی از زلزله است. به همین علت مهندسین همواره به دنبال راه حلی بودهاند تا اثرات ناشی از نیروی زلزله را به حداقل برساند و به دنبال آن هزینههای ساخت را کاهش بدهند. طراحی و اجرا انواع سیستم های باربر جانبی برای مقابله با نیروی زلزله و باد یکی از ارکان اجباری در ساخت و ساز است. اما گاهاً در ساختمان های بسیار بلند مرتبه یا ساختمان ها با اهمیت زیاد برای رسیدن به سطح عملکردی مورد نظر، سیستمهای باربر جانبی با ابعاد بسیار بزرگ مورد نیاز است که مطلوب مهندسین نیست. در پیرو حل این مشکل المان هایی تحت عنوان میراگر طراحی و تولید شدند و در کنار سیستم های باربر جانبی برای کاهش پاسخ دینامیکی سازه استفاده می شوند. با توجه به زلزلهخیز بودن کشور ما، سیستم میراگر در ساختمان اهمیت بالایی دارد. میراگر ها مکانیزم کار و انواع مختلفی دارند. انتخاب مناسبترین و بهینه ترین نوع میراگر باتوجه به میزان استحکام، نوع کاربری، مقدار سرمایه و خواص که انتظار دارید به پروژه بستگی دارد. علاوه بر این در عین حال می توانید از انواع مختلفی از میراگر برای ساختمانهای خود استفاده کنید. بنابراین بهترین راه حل این است که به انواع میراگر و نحوه مکانیزم آن ها به خوبی آشنا شوید؛ به همین منظور در این مقاله به شرح چگونگی عملکرد انواع میراگرها و مزایا و معایب آنها میپردازیم. انواع میراگر هایی که در این مقاله توضیح داده می شوند، از نوع غیر فعال هستند چرا که این نوع از میراگر ها قدمت بیشتری دارند. در انتها با یک مثال کوچک به طراحی یک نوع میراگر میپردازیم.
سرفصلهای این مقاله:
- میراگر چیست؟
- تاریخچه میراگر
- انواع روش کنترل سازه
- انواع میراگر های غیر فعال

تحلیل غیرخطی سازه، بهسازی لرزهای
طراحی سازه
میراگر چیست؟
مفهوم میرایی در یک سیستم سازه می تواند معانی مختلفی برای رشته های مهندسی مختلف داشته باشد. برای مهندس عمران، میرایی ممکن است تنها به معنای یک یادداشت مرجع در یک نمودار طیفی لرزه ای یا باد باشد، برای مثال ” میرایی 5%” رایج ترین نماد است. از دیدگاه یک مهندس سازه، میرایی به معنای تغییر در تنش کلی یک سازه در معرض ضربه و ارتعاش است. از سوی دیگر، مهندسان مکانیک لزوماً میرایی را یک ویژگی مفید نمیدانند، زیرا یکی از اهداف مهم در بهبود کارآیی یک سیستم این است که نیروها و حرکات به طور مؤثر و بدون تلفات انرژی منتقل بشود. بنابراین، نیاز به میرایی در یک سیستم اغلب نشان می دهد که یک خطای طراحی مهندسی رخ داده است.
در متن مهندسی مکانیک کلاسیک ” تئوری و کاربردهای ارتعاش “، ویلیام تامسون با ارائه توضیحات زیر، یک تعریف واحد و مستقیم از میرایی ارائه می کند: ” سیستم های ارتعاشی همگی کم و بیش در معرض میرایی هستند زیرا انرژی توسط اصطکاک تلف می شود؛ برای مثال در یک ارتعاش آزاد هیچ انرژی تامین نمی شود و با گذشت زمان حرکت سیستم کاهش می یابد که اصطلاحاً میگوییم ارتعاش میرا می شود.” به طور خلاصه می توان میرایی را به عنوان ویژگی یک سیستم دینامیکی که این ویژگی منجر به کاهش دامنه نوسان می شود، تعریف کرد. کاهش دامنه نوسان سیستم با حذف مقداری انرژی در آن سیستم اتفاق می افتد. با استناد به قانون بقای انرژی, این انرژی در واقع به شکل دیگری تبدیل می شود. در نتیجه، اصطلاح “دمپر” یا “میراگر” را می توان به عنوان مکانیزم یا خاصیت داخلی تعریف کرد که این انتقال انرژی را فراهم می کند. معمولا، میراگر ها انرژی مکانیکی را به گرما تبدیل می کند و سپس این گرما از طریق یکی از سه حالت انتقال حرارت یعنی رسانایی، همرفت و تشعشع در محیط اطراف پخش می شود.

شکل 1 : نمونه از میراگرهای استفاده شده در سازههای عمرانی
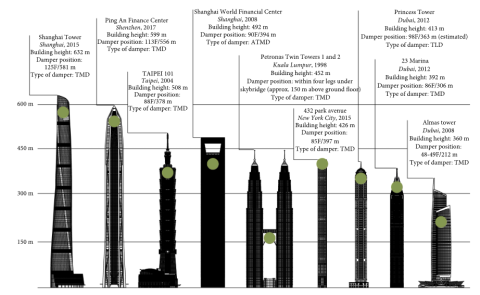
شکل 2 : مشخصات میراگرهای استفاده شده در سازه های بلند مرتبه در 20 سال اخیر
انواع روش کنترل سازه
محدودیت های موجود در روش های طراحی رایج، دلیل به وجود آمدن مفهوم کنترل سازه ها است. در کنترل سازهها، سازه به عنوان یک سیستم دینامیکی در نظر گرفته میشود تا ویژگیهایی نظیر سختی و میرایی به گونهای تنظیم شود تا اثرات دینامیکی بر روی سازه تا سطح قابل قبول کاهش بیابد. با تغییر ویژگی های سیستم دینامیکی (سختی و میرایی)، فرکانس طبیعی سازه نیز دستخوش تغییر میشود. به بیان دیگر کنترل سازه یعنی از المان هایی در سازه برای بهبود رفتار دینامیکی استفاده شود. برای این هدف روشهای مورد استفاده در چهار دسته اصلی تقسیم میشوند که در ادامه هر یک به طور خلاصه توضیح داده میشود.
کنترل فعال (Active Energy Dissipation)
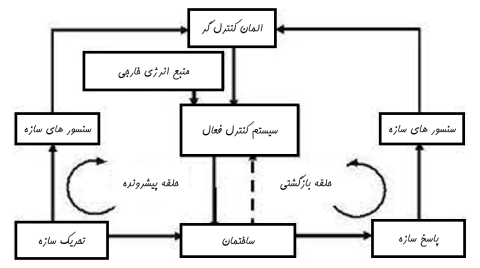
در یک سیستم کنترل فعال، با استفاده از اعضاء مخصوصی كه روی سازه نصب می شوند به عنوان یک منبع خارجی انرژی به المان های کنترل سازه وارد میکنیم. این نیروها می توانند در جهت مخالف نیروهای مخرب به سازه وارد شوند و نقش میراگر را بازی كنند.
در یک سیستم کنترل فعال به یک منبع خارجی بزرگ نیازمندیم که به طور دائم سازه ما را پشتیبانی کند. بنابراین این منبع خارجی باید در تمامی سطوح عملکردی بدون آسیب باقی بماند. نیروهای کنترل کننده وارد شده به سیستم بر اساس عکس العمل های ناشی از سنسورهای اندازه گیری پاسخ سازه و یا مقدار انرژی تحریکی تعیین میشود. در نتیجه احتمال اینکه سیستمهای کنترل فعال با اعمال نیروی مکانیکی اضافی به سازه منجر به ناپایداری آن شوند، نیز وجود دارد. بنابراین سیستم کنترل فعال نیازمند محاسبات ریاضی پیچیده و كامپیوتر های كنترل گر دقیق می باشد. میراگرهای جرم فعال یکی از نمونه های المانهای کنترل فعال در سازه است.
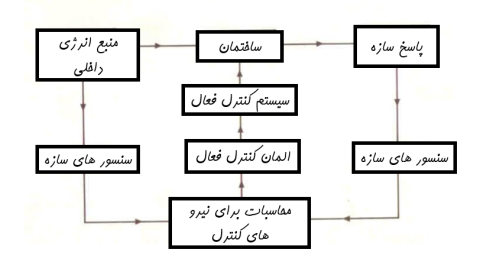
شکل 3 : الگوریتم عملکردی یک سیستم کنترل فعال
پیشنهاد مطالعاتی:
مقاله طراحی سازه بر اساس عملکرد چیست؟ بررسی جامع مفاهیم به همراه ویدیو
کنترل غیر فعال (Passive Energy Dissipation)
در یک سیستم کنترل غیر فعال، خصوصیات مکانیکی سیستم (سختی یا میرایی) بدون نیاز به منبع انرژی تغییر میکند. این تغییرات در سیستم به طور مقتضی و برای افزایش در سطح عملکرد و با توجه به بارگذاری در سیستم ایجاد میشود. به عبارت دیگر در یک سیستم کنترل غیر فعال تمامی واكنش های سیستم، متناسب با مقدار كنش وارده به سیستم می باشد .
این نیروهای کنترل (واکنش های سیستم) به صورت تابعی از پاسخ سازه در محل سیستم کنترل غیر فعال ایجاد میشوند بنابراین این سیستم نمیتواند در برابر عدم قطعیت های موجود مقابله کند و همواره نیاز به یک مدل عددی دقیق از سیستم فیزیکی و یک پیش بینی قابل اعتماد از بارهای طراحی می باشد. پس از نصب المان های کنترل غیر فعال در سازه، امکان ایجاد تغییرات دلخواه و آنی در آن ها وجود ندارد با این حال استفاده از سیستمهای کنترل غیر فعال به دلیل سهولت در نصب و هزینههای اجرا کم و ایجاد تاثیرات مطلوب در سازههای عمرانی بسیار رایج است.
وابستگی به فرکانس نیروی خارجی اعمالی و شرایط محیطی برای سیستم کنترل غیر فعال سازه و احتیاج به نیروی خارجی زیاد مانند برق در سیستم کنترل فعال سازه باعث به وجود آمدن دو سیستم کنترل نیمه فعال سازه و ترکیبی سازه شده است.
مزایای سیستم های کنترل غیر فعال
- کاهش دریفت (جابجایی نسبی) طبقات
- کاهش برش پایه سازه
- کاهش در خسارات اعضای غیر سازه ای
- کاهش در زمان و هزینه تعمیر و بازسازی ساختمان پس از وقوع زلزله
- سادگی طراحی، نصب و اجرا نسبت به سایر سیستم های کنترل سازه
- عدم نیاز به منبع انرژی خارجی
معایب سیستم های کنترل غیر فعال
- وابستگی به تحریک خارجی برای فعال سازی
- عدم تطبیق با شرایط موجود
- عدم امکان تغییرات در آن پس از نصب
- نداشتن توانایی مقابله با عدم قطعیت های موجود
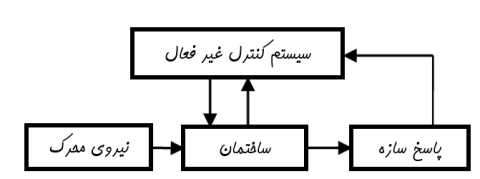
شکل 4 : الگوریتم عملکردی یک سیستم کنترل غیر فعال
کنترل نیمه فعال (Semi-Active Energy Dissipation)
در یک سیستم کنترل نیمه فعال، برای فعال کردن المان های کنترلگر از یک منبع انرژی خارجی استفاده میکنیم. این منبع انرژی خارجی با تغییر خصوصیات مکانیکی سیستم باعث فعال شدن المان های کنترلگر میشود. این سیستم ها در اصل سیستم های کنترل غیر فعالی هستند که خصوصیات مکانیکی (سختی و میرایی) آن ها قابل تغییر است. این تغییرات در سختی و میرایی بر اساس پاسخ های سازه تنظیم میشوند. این نیروهای ایجاد شده در سازه باعث کاهش پاسخ سازه میشوند. اغلب این نیروهای کنترل در سیستم های کنترل نیمه فعال در جهت خلاف حرکت سازه عمل میکنند، بنابراین باعث پایداری کلی سازه میشوند.
رفتار سیستم های کنترل نیمه فعال غالباً در محدوده غیرخطی هستند و تعداد زیادی از مزایای سیستمهای کنترل فعال را دارند بدون اینکه به منبع انرژی بزرگی احتیاج داشته باشند.
بعضی از سیستمهای کنترل نیمه فعال برای مقابله با عدم اطمینانهای موجود در سیستمهای سازهای با استفاده از مقادیر پارامترهای کنترل سازه، به صورت کاملاً غیر متمرکز (Non-Centralized) عمل میکنند. المان های کنترل نیمه فعال انرژی مکانیکی به سازه وارد نمیکنند و با انرژی بسیار اندک (معمولا در اندازه چند باطری کوچک) فعال میشوند. این المان ها برای تغییر ویژگی های مکانیکی سیستم به یک دستگاه کنترل رفتار (مثلاً یک شیر کنترل الکتریکی) نیاز دارند بنابراین این انرژی تولید شده المانهای کنترل نیمه فعال همیشه به سرعت نسبی و تغییر مکان دستگاه کنترل رفتار بستگی دارد.
شکل 5 : الگوریتم عملکردی یک سیستم کنترل نیمه فعال
سیستم ترکیبی یا پیوندی (Hybrid Energy Dissipation system)
همانطور که پیش تر گفته شده به دلیل مکمل بودن سیستم های کنترل سازه برای افزایش بازدهی بهتر است که این سیستم ها با هم استفاده شوند. سیستم کنترل ترکیبی (کنترل پیوندی) ترکیبی از سیستمهای کنترل فعال و غیر فعال است. در یک سیستم کنترل پیوندی، از یک المان کنترل غیر فعال برای جهت کاهش انرژی مورد نیاز در یک سیستم کنترل فعال یا به طور برعکس از یک سیستم کنترل فعال برای افزایش بازدهی در یک سیستم کنترل فعال استفاده می شود.
از مزایای یک سیستم کنترل ترکیبی میتوان به موارد زیر اشاره کرد: این سیستم ها برخی از محدودیتهای موجود در هریک از سیستمهای کنترل را نداند. این سیستمها به طور کلی از هر یک از سیستم های تشکیل دهنده خود از سطح عملکرد بالاتری برخوردارند. علاوه بر این در صورتی بروز مشکل برای منبع انرژی قسمت غیر فعال کنترل ترکیبی همچنان می تواند از سازه محفاظت کند.
سایر سیستمهای اتلاف انرژی
در علم کنترل سازه ها مباحث زیادی در رابطه با تحلیل مکانیکی و طراحی سازه های مقاوم در برابر زلزله، وجود دارد. در زمینه اتلاف انرژی یکی از مهمترین این مباحث است سیستم هایی تحت عنوان جداساز ها وجود دارند که عملکردی مشابه سایر المان های کنترل سازه دارد و باعث اتلاف انرژی زلزله در پی سازه و مانع از ارتعاش سازه می شوند .
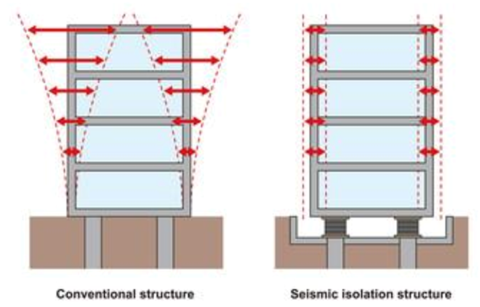
شکل 6 : تاثیر استفاده از جداساز ها در پاسخ سازه
پیشنهاد مطالعاتی
مقاله روشهای مقاوم سازی ساختمان در برابر زلزله( راهنمای گام به گام)
میراگر ها به عنوان یکی از ابزار های کاربردی در کنترل سازه انواع مختلفی دارد. در شکل زیر انواع میراگر ها را در دسته های مختلف سیستم های کنترل دسته بندی کرده ایم و در قسمت های بعدی به معرفی انواع رایج میراگرها پردازیم. در ادامه نیز به دلیل اهمیت استفاده از جداساز ها به اختصار انواع مختلفی از آن هارا معرفی می کنیم.
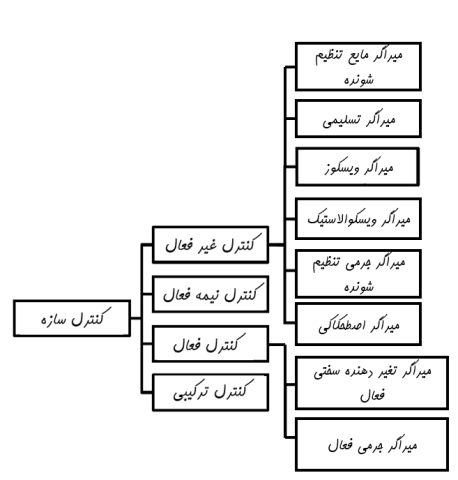
شکل 7 : دسته بندی انواع میراگرها از نظر نوع سیستم کنترل
انواع میراگر های غیر فعال
روش كنترل غیر فعال كه نسبت به دو روش دیگر کنترل سازه میزان كاربرد و قدمت بیشتری دارد. قاب خمشی فولادی به دلیل شکل پذیری مناسب و قابلیت جذب انرژی زیاد در زمان زلزله همواره به عنوان یك سیستم مطلوب در ساختمان سازی استفاده می شود اما ضعف اصلی آن تغییرمکان بالا و سختی پایین می باشد .
به طور كلی روشهای مختلفی برای طراحی سازه ها در برابر نیروهای دینامیکی استفاده می گردد. یک سازه با تركیبی از سختی، قابلیت شکل پذیری و همچنین استهلاك انرژی، از خود مقاومت نشان می دهد .
در حالت معمولی میزان میرایی در سازه ها بسیار كم می باشد و بنابراین انرژی مستهلك شده در محدوده رفتار الاستیك سازه بسیار ناچیز می باشد ولی هنگامی كه نیروهای دینامیکی قوی به سازه وارد می شود تغییر مکانهای بزرگی در سازه ایجاد می گردد .
در این حالت سازه فقط به دلیل قابلیت تغییر مکان غیر الاستیك به وجود آمده در آن پایدار باقی می ماند. چنین تغییر مکانهایی موجب به وجود آمدن مفصل پلاستیك به صورت موضعی در نقاطی از سازه می گردد كه خود موجب افزایش شکل پذیری و هیچنین افزایش استهلاك انرژی می شود .
در این حالت مقدار زیادی از انرژی وارد شده به واسطه تخریبهای موضعی در سیستم مقاوم جانبی سازه مستهلك می گردد. ایمنی یك سازه می تواند با كاهش وزن ، تعویض اعضای ضعیف یا افزایش سختی سازه به طوری كه فركانس طبیعی ارتعاش سازه از فركانس تشدید دور گردد تامین شود، اما این روشها در بسیاری از مواقع با هزینه های زیادی همراه است ویا ممکن است اساسا مقدور نباشد.
از جمله روشهایی كه در سالهای اخیر برای مقاوم سازی سازه ها مورد توجه قرار گرفته است، استفاده از سیستم های جاذب انرژی می باشد، كه كاهش میزان جابهجایی سازه را در حد مطلوبی فراهم می كند. این سیستم ها به طور كلی به گروه های وابسته به جابجایی، وابسته به سرعت وسایرموارد تقسیم می گردند.
- وسایل وابسته به جابه جایی باید شامل وسایلی باشند كه رفتار سخت و پلاستیك مانند مانند وسایل فلزی جاری شونده داشته باشند .
- وسایل وابسته به سرعت شامل میراگرهای ویسکو الاستیك و ویسکوز می باشند.
- تجهیزات اتلاف انرژی كه در این دو دسته قرار نمی گیرند جزء سایر محسوب می گردند. در این قسمت هر یك از میراگر های فوق معرفی گشته و چگونگی كار كرد آنها توضیح داده می شود.
پیشنهاد مطالعاتی:
مقاله منحنی هیسترزیس چیست؟ کاربرد آن در تحلیل های غیرخطی سازه
میراگرهای تسلیمی فلزی (Metallic Yielding Damper)
خواص میرایی در محدوده پیش از تنش تسلیم و رفتار میرایی فلزات در بارگذاری متناوب بر اساس ساختمان کریستالی فلزات تعیین میشود. قطعات فلزی به اشکال مختلف (برای مثال مثلث متساوی الساقین ) هنگامی که در محل اتصال اعضاء سازه قرار داده میشوند حین بارگذاری دینامیکی سازه رفتار میرای از خود نشان می دهند.در میراگرهای تسلیمی فلزی در حین بارگذاری تغییر شکلهای پلاستیکی در فلز اتفاق می افتد که اصطکاک داخلی کریستال ها باعث اتلاف انرژی در سیستم میشود و اصطحلاً میرایی اتفاق میافتد.
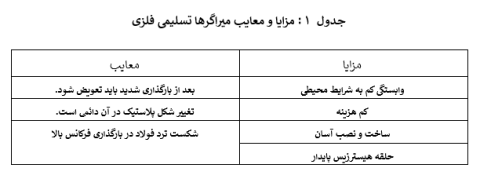
جنس فلزی كه برای ساخت میراگرهای تسلیمی فلزی به كار می رود، باید ویژگی های خاصی را دارا باشند؛ این ویژگی ها شامل رفتار مناسب تغییر هیسترزیس، دامنه خستگی بالا، استحکام نسبی بالا و عدم حساسیت زیاد نسبت به تغییرات درجه حرارت میباشد. همان طور كه در تعریف میراگر گفته شد بایستی جنس و شکل و محل استفاده این دسته از میراگرها را طوری انتخاب كنیم كه در طول عمر سازه، خواص میرایی آن ها تحت عوامل مختلف تاثیر گذارنده دچار اختلال نگردد. قیمت میراگر فلزی تسلیم شونده، بسیار مناسب است و جنس آن معمولا از فولاد یا سرب است.
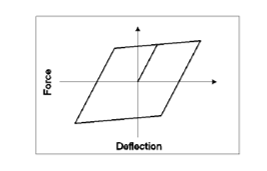
شکل 8 : نمودار هیستریزس ایده آل میراگرها تسلیمی فلزی
اولین كارها در زمینه به كار گیری میراگر های فلزی در سازه به منظور جذب انرژی با كارهای آزمایشگاهی بین سالهای 1972 تا 1975 شروع شد. طرح های معمول مورد استفاده در سازه ها برای میراگر های فلزی به شکل ورق های مثلثی و x شکل می باشد. این میراگرها معمولاً بین راس مهار بندهای جناقی و تیر طبقه نصب می شوند. با پیش بینی اتصالات مناسب، این میراگرها در قابهای بتنی نیز قابل نصب می باشند.
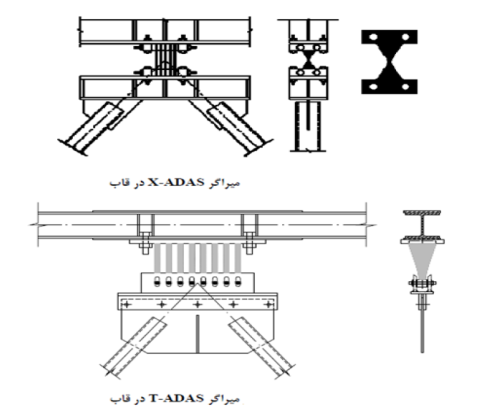
شکل 9 : نمونه ای از میراگرها تسلیمی فلزی در قاب
مدلهای ریاضی گوناگونی جهت ایده آل سازی رفتار میراگر فلزی معرفی شده اند که شامل مدل الاستیك-پلاستیك كامل، مدل خطی الاستیك با كرنش سخت شدگی و مدل رامبرگ-اوزگود میباشد. لازم به ذكر است مدلهای فوق برای توصیف پاسخ به بارگذاری سیکلی دلخواه كه در آن وضعیت تنش نه تنها به كرنش فعلی بلکه به تمامی تاریخچه قبلی آن وابسته است مناسب نمی باشد. در نتیجه به منظور توسعه مدل هایی برای میراگرهای فلزی می باید این بحث را به رفتار آنها تحت بارهای رفت و برگشتی كه شامل رفتن به ناحیه غیر الاستیك است بسط داد.

جامعترین دوره آموزش طراحی سازه پروژه محور برای بازار کار
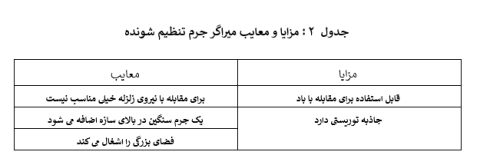
طراحی سازهمیراگر جرم تنظیم شونده (Tuned Mass Damper)
میرا گر جرم تنظیم شونده با جرمی در حدود 1 الی 5 درصد وزن کل سازه به وسیله یک فنر و کمک فنر در محلی از سازه، که معمولاً دارای بیشترین تغییرمکان میباشد(نظیر بام سازه) قرار می گیرند؛ با این عمل میرایی در سازه ایجاد می شود و پاسخ دینامیکی کاهش می یابد. در این سیستم، سازه و میراگر هرکدام یک قسمت از سیستم را تشکیل می دهند. میراگر جرمی می تواند توسط غلتك هایی در جهت افقی (انتقالی – جانبی نسبت به كف) حركت آزادانه ای داشته باشد.
عملکرد این میراگر به این صورت است که وقتی نیروی دینامیکی به سازه وارد می شود و ارتعاش می یابد، در نتیجه ی تولید انرژی جنبشی (K1)، میراگر جرمی تنظیم شونده به وسیله ساختار فنر یا حرکت آونگی خود با ایجاد نیروی (D1) در خلاف جهت حرکت سازه، سازه را وادار به حرکت در جهت مخالف با حرکت اولیه خود می کند. این اتفاق زمانی که سازه در جهت مخالف شروع به حرکت می کند نیز اتفاق می افتد؛ یعنی با برگشت سازه مجددا میراگر جرمی تنظیم شونده در جهت مخالف حرکت میکند. این عمل باعث ایجاد نیروی مقابله کننده میراگر جرمی تنظیم شونده می شود که هر وقت سازه به هر سمتی شروع به حرکت نماید در جهت مخالف آن وارد عمل می شود. وقوع این اتفاق منجر به کاهش زمان ارتعاش سازه و در نتیجه کاهش زمان تناوب ارتعاش سازه می گردد.
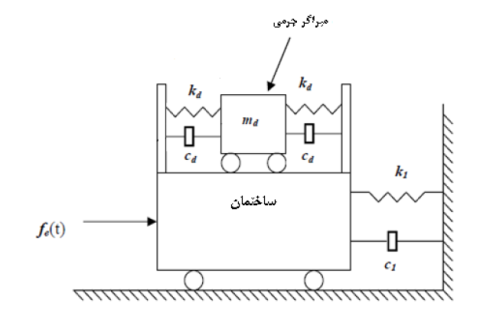
شکل 10 : نمای شماتیک یه سازه با میراگر جرم تنظیم شونده
ایده اولیه استفاده از این نوع میراگر به سال 1909 برای كاهش حركت در کشتی بازم می گردد؛ به این صورت که حرکت اجسام متحرک در کشتی باعث کاهش حرکت خود کشتی در مقابل امواج می شد. بعد ها میراگرهای جرمی تنظیم شده به جذب كننده های دینامیکی سیستم های مکانیکی محدود شدند .ولی در انتها كاربرد آنها در سازه مورد توجه قرار گرفت. نظریه های اولیه این میراگر صرفا به سیستم های یك درجه آزادی بدون میرایی با بارگذاری سینوسی محدود می شوند. اما امروزه در سیستم های چند درجه آزادی هم به طور معمول استفاده میشوند.
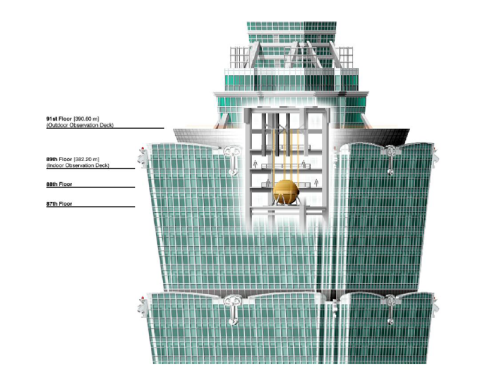
شکل 11 : نمونه از یک میراگر جرم تنظیم شونده در سازه بلند مرتبه
پیشنهاد مطالعاتی
مقاله نکات مهم قبولی در آزمون محاسبات نظام مهندسی
میراگر مایع تنظیم شده (Tuned Liquid Dampers)
این میراگر مشابه میراگر جرم تنظیم شونده است؛ که در این میراگر جرم یک سیال است. عملکرد این میراگر مشابه میراگر جرم فعال است اما با این تفاوت که نیروی خلاف جهتی که توسط این میراگر به سازه وارد می شود ناشی از لختی سیال است. از این نوع میراگر در سازههای بلند مرتبه استفاده می شود. این میراگر مخزن های مایع کم عمق نصب شده در بالای سازه است که با ارتعاش سازه، مقدار زیادی انرژی توسط رفتار لخت سیال و نیروهای هیدرودینامیکی ناشی از آن اتلاف می شود.
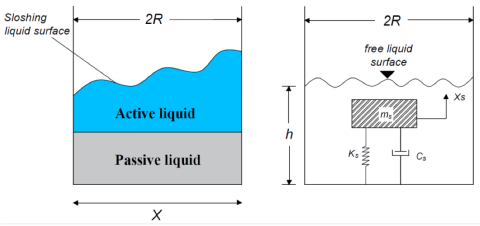
شکل 12 : نمای شماتیک یه سیستم با میراگر سیال تنظیم شونده
عوامل موثر بر رفتار میراگر مایع تنظیم شده به شرح زیر می باشد:
- نسبت جرم سیال به جرم سازه
- ابعاد و شکل مخزن
- پارامتر زبری دیواره مخزن
- عمق سیال در مخزن
- لزجت سیال

شکل 13 : نمونه از یک میراگر سیال تنظیم شونده در سازه بلند مرتبه
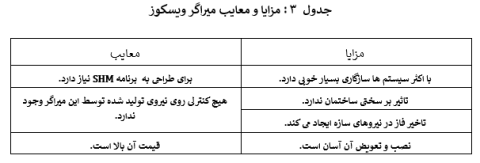
میراگر ویسکوز (Viscous Damper)
این میراگر شامل یك پیستون فولادی با تعدادی سوراخ در انتهای آن می باشد؛ این روزنه ها هنگام حرکت پیستون داخل سیلندر، امکان انتقال مایع درون سیلندر به سمت دیگر پیستون را فراهم می کنند. سیلندر توسط یك ماده سیال لزج چسبناک (مثل ژل سیلیکون یا روغن) پر می گردد. این میراگر شبیه كمك فنر خودرو میباشد. میراگرهای ویسکوز می توانند مانند میراگر انرژی خالص تولید کنند یا به عنوان یك فنر نیرو به سیستم وارد کنند (یا به صورت تركیبی از هر دو).
حركت پیستون در این ماده سیال لزج چسبناک با مقاومت آن روبرو می شود. این مقاومت باعث جذب انرژی جنبشی و تبدیل آن به انرژی گرمایی می گردد. چون در این نوع میراگرها نیروی میراگر كاملاًخارج از فاز تنش های وارده بوده و نیروی میرایی با سرعت تغییر می نماید، میراگر تنش و تغییر شکل های ایجاد شده در سازه را با هم كاهش می دهد.
در نتیجه این میراگر ها معمولا باعث افزایش تنش در ستونها در ضمن كاهش سرعت و جابهجایی میشوند. برای مثال هنگامی که در اثر نیروی دینامیکی وارده به سازه، ستون به حداكثر جابهجایی خود (در نتیجه حداكثر تنش رسید)، در این زمان نیروی میرایی صفر می شود و وقتی ستون باز می گردد در این زمان در حداكثر سرعت خود است و در نتیجه نیروی میراگر ماكزیمم می شود و در همین لحظه نیروی ستون به كمترین مقدار خود می رسد.
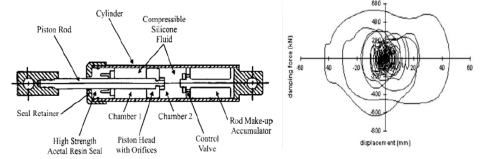
شکل 14 : نمودار هیستریزس و اجزای تشکیل دهنده میراگر ویسکوز
در گذشته كاربرد های زیادی از میراگرهای ویسکوز برای كنترل ارتعاشات ناشی از ضربه در سیستم های فضایی و دفاعی مشاهده شده است. تجربه نشان داده است كه این میراگر می تواند دارای اثر قابل ملاحظه ای در كنترل ارتعاشات باشد. اولین استفاده از این نوع میراگر در ابعاد بزرگ، به منظور كاهش پسزدگی توپخانه های بزرگ در كارهای نظامی بوده است.
میراگرهای ویسکوز در ابعاد و ظرفیت های مختلفی وجود دارد که هم در ساختمانهای جدید و هم برای مقاومسازی ساختمانهای موجود استفاده میشوند. این میراگر هم در ساختمانهای بلند و هم در ساختمان های کم ارتفاع در مناطق لرزهخیز استفاده میشود و در دمای محیطی بین ۴۰ تا ۷۰ درجه سانتیگراد بدون هیچگونه خللی در عملکرد کار می کند. همچنین در کاهش ارتعاشات ناشی از باد شدید نیز موثر است. آن ها به راحتی نصب و با سایر سیستم های سازه ای سازگار میشوند.

شکل 15 : نمونه از نصب یک میراگر ویسکوز در قاب ساختمانی
پیشنهاد مطالعاتی
مقاله صفر تا صد مقاوم سازی با پوشش FRP
میراگر اصطکاکی (Friction Damper)
در میراگر اصطکاکی انرژی زلزله صرف غلبه بر اصطکاك موجود در سطح تماس قطعات می شود. این میراگر ها بر اساس شبیه سازی ترمز ماشین در سال 1980 جهت بهبود پاسخ لرزه ای سازه ها ابداع شدند.
میراگرهای اصطکاكی از صفحات فلزی و لایه هایی از مواد مخصوص با خواص اصطکاكی ویژه كه بین این صفحات قرار گرفته است تشکیل شده است. یك بولت مقاومت بالای پیش تنیده برای برقرار كردن نیروی مورد نیاز در سطح اشتراك پدهای اصطکاكی و صفحه های فلزی به كار برده میشود.
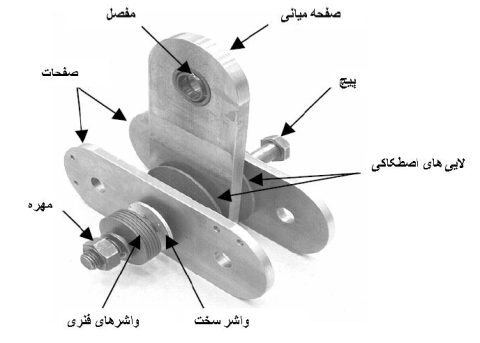
شکل 16 : اجزای یک میراگر اصطکاکی
این میراگر انرژی که از طریق زلزله به آن وارد می شود را از طریق لغرش مخالف قطعات مستهلک میکند. مقدار انرژی مستهلك شده متناسب با مقاومت اصطکاكی و چرخش نسبی بین صفحات میراگر میباشد. با افزایش میرایی سازه و استهلاك انرژی زمین لرزه، نیروهای وارده و تغییر مکانهای ایجاد شده توسط زلزله در ساختمان؛ به صورت هم زمان به میزان قابل توجهی قابل كاهش می باشند در حالی كه كاهش هم زمان این دو در روش های سنتی مقاوم سازی معمولا امکان پذیر نیست. كاهش نیرو سبب كاهش آسیب به اسکلت ساختمان و كاهش تغییر مکان سبب كاهش آسیب به المانهای معماری و دیوارها و نازك كاریها می گردد. این میراگرها به موازات مهاربندها نصب می شوند. در مهار بند های قطری بایدطراحی به نحوی باشدكه پیش ازجاری شدن مهاربندكششی، در میراگر لغزش اتفاق بیفتد و به صورت مکانیکی انرژی ورودی به ساختمان را مستهلك نماید.
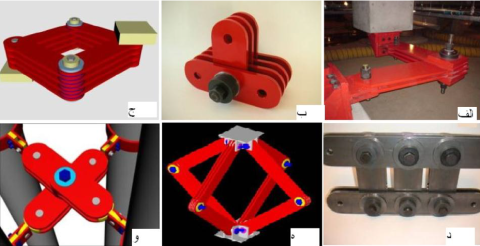
شکل 17 : انواع مختلف میراگر اصطکاکی
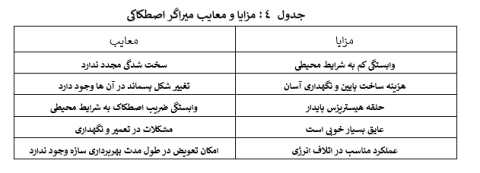
میراگرهای اصطحکاكی نسبتاً ساده برای مدل سازی هستند. آنها میتوانند مانند تاندوم یا فنربا سختی داخلی و نیروی تسلیمی برای دادن بار لغزش مدل شوند. مدلها معمولاً منحنی های كاملا الاستوپلاستیك هستند. اصطکاك منبع اتلاف انرژی ارزانتری نسبت به سایر منابع است و این ساخت میراگرهای اصطکاكی ر ا ارزانتر می سازد. میراگرهای اصطکاکی، بعد از زلزله نیازی به تعویض ندارند. اما ازطرف دیگر میراگرهای اصطکاكی اغلب درمعرض هوا هستند و امکان زنگ زدگی صفحات فلزی در آن ها وجود دارد. خیس شدن پد های لاستیکی و حرارت محیط می تواند باعث تغییر در خواص لغزش آنها شود. از ویژگی های دیگر این میراگرها می توان به عدم ایجاد خستگی در بارهای خدمت به دلیل فعال نشدنِ میراگرها تحت این بارها و وابسته نبودن عملکرد آنها به سرعت بارگذاری و دمای محیط می توان اشاره نمود.
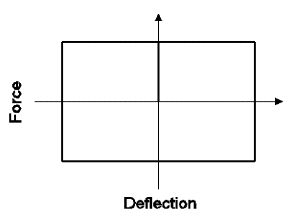
شکل 18 : نمودار هیسترزیس میراگر اصطکاکی
در چند دهه اخیر میراگرهای اصطکاکی مختلفی تولید شده است که به شرح زیر است:
- میراگر اتصال اصطکاکی
- میراگر اصطکاکی دورانی
- میراگر اصطکاکی پال
پیشنهاد مطالعاتی
مقاله ۹ روش کسب درآمد از طراحی سازه
میراگر ویسکوالاستیک (Viscoelastic Dampers)
شکل شماتیک این میراگر ها مشابه میراگر های اصطکاکی است با این تفاوت که در بین صفحات فلزی مواد ویسکوالاستیک وجود دارد. از لحاظ عملکردی این میراگر ها مشابه میراگرهای فلزی عمل می كنند؛ با این تفاوت كه به دلیل ساختمان پلیمری و خواص ایزوتروپیکی در بارگذاری های مختلف، به وسیله تغییر شکلهای برشی اتلاف انرژی اتفاق می افتد. مقدار نیروی میرایی در این نوع میراگر هم به سرعت و هم به میزان تغییر مکان ایجاد شده در آنها وابسته است. بنابراین میراگرهای ویسکوالاستیک باید به گونه ای در سازه نصب شوند كه تنشهای وارد به آن ها از نوع برشی باشد تا خاصیت میرایی از خود نشان بدهند.
هنگامی که سازه تحت بار های دینامیکی قرار میگیرد ارتعاش سازه سبب حركت نسبی بین بالهای فولادی خارجی و ورق میانی می گردد و مواد ویسکو الاستیك (عموما از جنس پلیمر بوده) در بین این ورقه های فولادی دچار تغییر شکل برشی می شوند و در نهایت اتلاف انرژی صورت می پذیرد. یکی از خواص منحصر به فرد مواد ویسکو الاستیك این است كه خواص این مواد تحت تأثیر پارامتر های گوناگونی شامل : فركانس، درجه حرارت، نرخ كرنش دینامیکی، خزش و خستگی قرار دارند. مهمترین این پارامترها شامل فركانس و درجه حرارت می باشند.
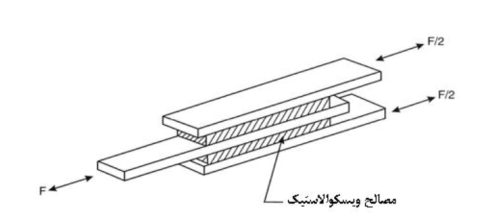
شکل 19 : اجزای یک میراگر ویسکوالاستیک
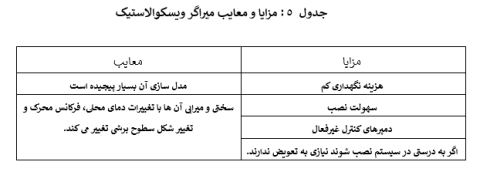
میراگرهای ویسکوالاستیک به دلیل تاثیر عوامل مختلف بر روی مقدار میرایی آن از تاریخ مصرف برخوردارند و باید پس از مدتی تعویض شوند. ممکن است در طول عمر یك سازه، چندین بار تعویض میراگرها صورت گیرد كه بزرگترین نقطه ضعف میراگر ویسکوالاستیک می باشد. این میراگرها در طرح ها و رنگ های مختلف بسته به معماری طرح قابل نصب هستند. در برخی موارد در صورت لزوم، می توان آنها را در داخل پارتیشن نیز نصب نمود.
استفاده این میراگر ها به هدف كنترل ارتعاش سازه ها به سال 1950 باز می گردد. برای اولین بار در صنعت هوایی میراگر ویسکوالاستیک به هدف كنترل خستگی ناشی از ارتعاشات در بدنه هواپیما به كار گرفته شد . استفاده از این میراگر در سازه های مهندسی از سال 1969 و با نصب 10000 میراگر در هر یك از برج های دوقلوی مركز تجارت جهانی در نیویورك به منظور كمك به مقاومت سازه در برابر بارهای ناشی از باد شروع شد. استفاده میراگرهای ویسکو الاستیك در سالهای اخیر در سازه های بلند بسیار رایج شده است.
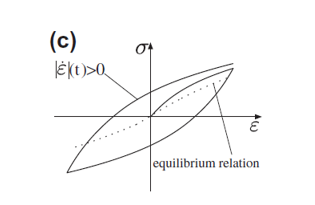
شکل 20 : نمودار هیسترزیس میراگر ویسکوالاستیک
جداساز های لرزه ای (Base Isolation)
یکی دیگر از روشهای اتلاف انرژی وارد بر سازه قرار دادن لایه ای با شکل پذیری زیاد در پایه سازه می باشد تا نیروی وارده صرف تغییر شکل لایه شود، به این لایه ها جداسازی ایزولاتور گفته می شود. در شکل 6 تفاوت رفتار سازه دارای جداساز با سازه بدون جداساز به طور شماتیك نشان داده شده است. جداساز ها انواع بسیار مختلفی دارند که با توجه به نیاز پروژه استفاده میشوند.
در واقع سیستم جداساز سازه را از مولفه های افقی حركت زمین جدا می سازد. در نخستین مود دینامیکی سازه جداسازی شده، تغییر شکل فقط در سیستم جداساز به وجود می آید و قسمت بالای سازه ازهر نظر صلب می باشد. در مود های دینامیکی بالاتر تغییر شکل در سازه اتفاق می افتد. امکان رخدادن مود های دینامیکی بالاتر در سازه بسیار کم است بنابراین سازه انرژی زیادی از زلزله دریافت نخواهد کرد.
در ادامه به طور مختصر انواع پرمصرف جداساز ها به همراه مزایا و معایبشان بیان میشود:
جداسازهای لاستیکی
این جداساز باعث افزایش دوره تناوب سازه میشود و انرژی ورودی به سازه را کاهش می دهد. ساختار این جداساز همانطور که در شکل زیر مشاهده میکنید از ورقه های فولادی و لاستیکی به صورت یک در میان تشکیل شده است که از ویژگی های این سیستم سختی جانبی کم و سختی محوری مناسب است. جداساز در صورتی که از لاستیک طبیعی ساخته شود دارای کیفیت مطلوب، ماندگاری و پایداری نسبتاً زیاد است. معایب این میراگر میرایی محدود است؛ نسل جدید این میراگر ها دارای میرایی نسبتا زیاد است.
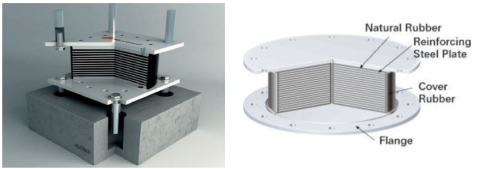
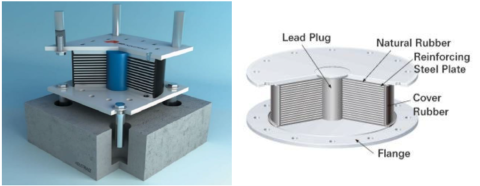
شکل 21 : اجزای یک جداساز لاستیکی
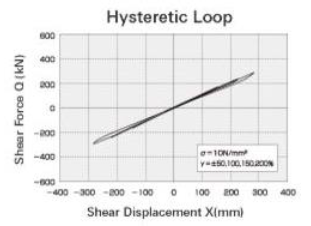
شکل 22 : نمودار هیسترزیس جداساز لاستیکی
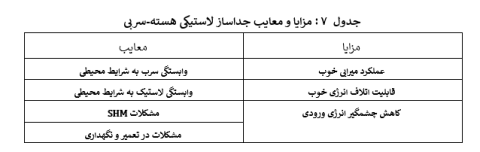
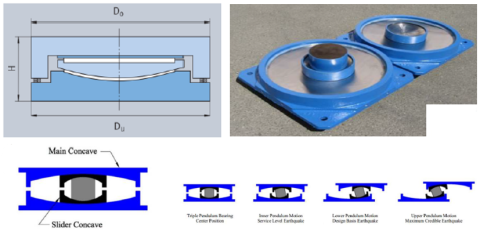
جداسازهای لاستیکی هسته-سربی
در این جداساز ها همانطور که از اسمشان پیدا است یک یا چند هسته سربی وجود دارد که توسط جداساز لاستیکی احاطه شده اند. میرایی این جداساز نسبت به جداساز لاستیکی با میرایی کم بسیار بیشتر است در نتیجه جذب انرژی بیشتری دارد. سرب در این جداساز سختی اولیه بسیار زیادی را در اختیار سیستم قرار می دهد که باعث می شود در سطح انرژی بالا فعال شود و معایب نوع لاستیکی خود را بپوشاند. قیمت این نوع از جداساز ها بالا است.
شکل 23 : اجزای یک جداساز لاستیکی هسته-سربی
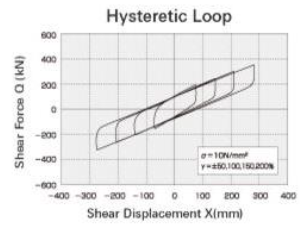
شکل 24 : نمودار هیسترزیس جداساز لاستیکی هسته-سربی
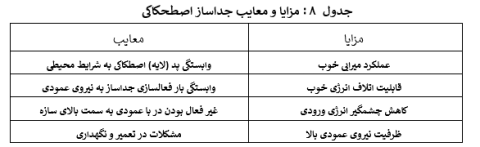
جداساز های اصطحکاکی
جداساز اصطحکاکی از فولاد ضد زنگ ساخته می شود و به دلیل داشتن هندسه خاص خود نیروی مقاومتی برای جلوگیری از ارتعاش زیاد به سازه وارد می کند.
شکل 25 : اجزای یک جداساز اصطحکاکی
طراحی میراگر
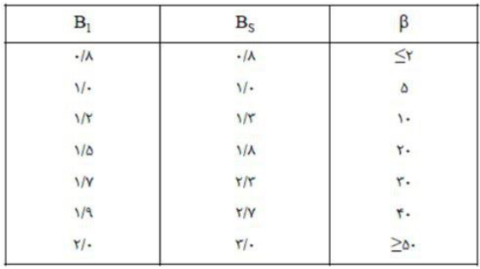
در آیین نامههای طراحی و بهسازی لرزه ای اثر میرایی با تعریف ضریب میرایی (B) که تابعی از درصد میرایی بحرانی (β) است، مشخص می شود. این ضریب برای دو حالت زمان تناوبهای کوتاه (BS) و زمان تناوبهای نزدیک به یک ثانیه (B1) تعریف شده است. دامنه عمل (BS) بر روی منحنی طیف پاسخ بین زمان تناوب To/2 تا To است. To زمان تناوب انتقال از محدوده شتاب ثابت به سرعت ثابت طیف می باشد. از ضریب (B1) نیز برای کاهش طیف در زمان تناوب های بالاتر از To استفاده می شود. مقادیر ضریب میرایی براساس درصد میرایی بحرانی در جدول زیر ارائه شده است.
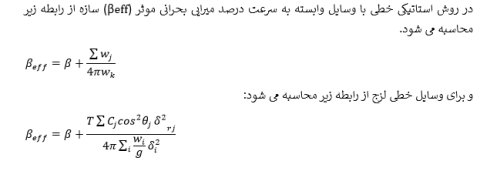
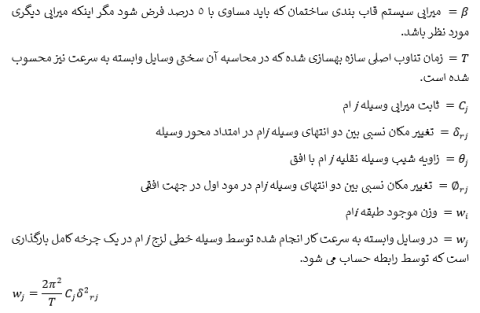
در روش استاتیکی خطی با وسایل وابسته به تغییر مکان درصد میرایی بحرانی موثر (βeff) سازه از رابطه زیر محاسبه می شود.
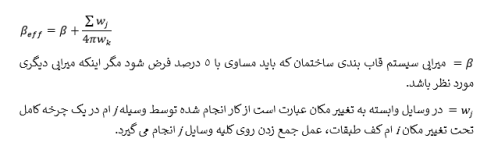
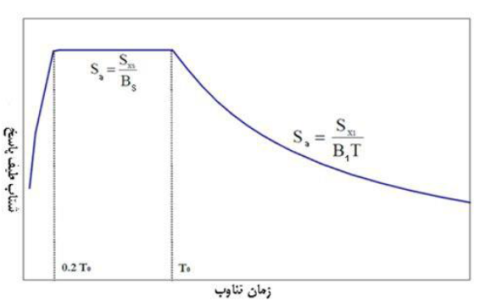
شکل 26 : طیف پاسخ طرح براساس ضریب میرائی
جدول 9 : ضرایب B1 و BS برحسب درصد میرایی موردنظر
برای مثال اگر بخواهیم یک میراگر ویسکوز را به سازه متصل کنیم. این نوع میراگرها به سه روش زیر به سازه متصل میگردند:
- نصب میراگرها به کف یا فنداسیونها (در روش جداسازی لرزهای)
- اتصال میراگرها در بادبندهای جناقی
- نصب میراگرها در بادبندهای قطری
پیشنهاد آموزشی: آموزش پروژه محور طراحی سازه فولادی و بتنی با ایتبس و سیف
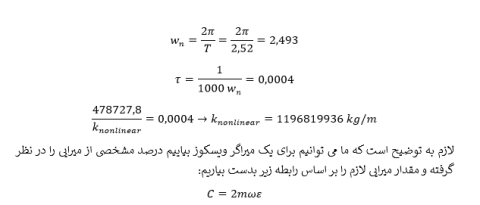
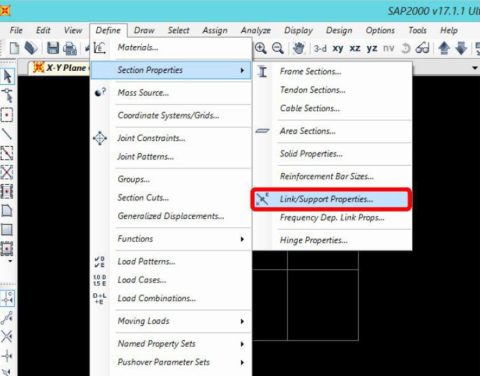
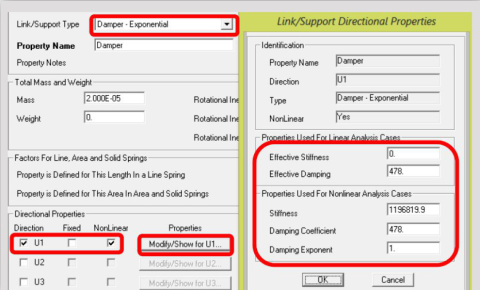
اگر بخواهیم سختی میراگر برای مدلسازی در نرم افزار SAP2000 تعیین کنیم مراحل زیر را باید طی کنیم. در صورتیکه رفتار میرایی محض از میراگر مد نظر باشد، لازم است تا تدابیری اتخاذ گردد که اثر نرمی فنر از مدل حذف گردد. بدین منظور کافی است تا سختی فنر به اندازه کافی بزرگ تعریف گردد. به عنوان یک قاعده بین T کلی اگر سختی به گونه ای اختیار گردد که پارامتر 1100 تا 11000 معکوس فرکانس طبیعی سازه بدست آید، مناسب خواهد بود. برای درک بهتر به مثال زیر توجه کنید:
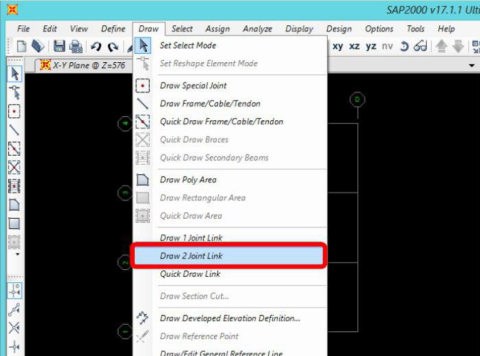
برای رسم میراگر ویسکوز از گزینه ی Draw 2 joint Link استفاده می کنیم و بین دو نقطه مورد نظر
میراگر را به صورت قطری رسم میکنیم.
شکل نهایی به صورت زیر خواهد بود:
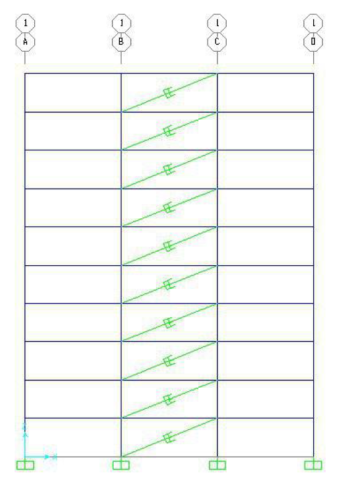
شکل 27 : شکل نهایی قاب مورد نظر و محل نصب میراگر ها
لازم به توضیح است که موقعیت نصب میراگر در ساختمان و تعداد آن در هر طبقه بسته به روشی استفاده شده متفاوت خواهد بود، لذا ما می توانیم در هر طبقه بر اساس نیاز سطح کاربری مورد نظر برای کنترل پاسخهای لرزه ای سازه، میراگر نصب کنیم. لازم به توضیح است که میراگر ویسکوز از جمله میراگرهاییست که فقط به سازه میرایی اضافه می کند و به وسیله میرایی الحاقی پاسخ های لرزه ای سازه ها را به خوبی کنترل می نماید. در حالت کلی استفاده از این میراگر و مدلسازی آن ساده بوده و پرکاربردتر از سایر میراگرها است.
تحلیل غیرخطی سازه، بهسازی لرزهای
طراحی سازه
منابع:
- دستورالعمل استفاده از ميراگرها در طراحي و مقاوم سازي ساختمان ها (ضابطه شماره 766)
- راهنمای روشها و شیوههای بهسازی لرزه ای ساختمانها موجود و جزِییات اجرایی (نشریه 524)
- میراگرهای غیرفعال و كاربرد آنها در بهبود رفتار دینامیکی سازه های دریایی تالیف مهرداد شمسی زادگان، محید جواد كتابداری
- معرفی عملکرد میراگرهای جاذب انرژی در مقاوم سازی ساختمانها تالیف روح الله هیزجی
- Fluid Viscous Damper by Taylor Devices
- Bishay-Girges, Nagui W., and Athol J. Carr. “Ring spring dampers: passive control system for seismic protection of structures.” Bulletin of the New Zealand Society for Earthquake Engineering 47, no. 3 (2014): 173-180.
- Khazaei, M. “Investigation on dynamics nonlinear analysis of steel frames with steel dampers.” Procedia Engineering 54 (2013): 401-412.
- Passive control of offshore jacket platforms by K.C. Patil, R.S. Jangid.